@article{10989779,author={Dong, Xuguang and Wang, Yixin and Zhou, Jingyi and An, Xin and Zhu, Yinglei and Xie, Fugui and Liu, Xin-Jun and Zhao, Huichan},journal={IEEE Transactions on Robotics},title={Design and Control of a Musculoskeletal Bionic Leg With Optimized and Sensorized Soft Artificial Muscles},year={2025},volume={41},number={},pages={3402-3422},keywords={Legged locomotion;Robots;Robot sensing systems;Sensors;Actuators;Force;Artificial muscles;Optical sensors;Bellows;Optical fiber sensors;Biologically-inspired robots;fluidic elastomer actuator (FEA);legged robotics;soft sensors and actuators},doi={10.1109/TRO.2025.3567801},}
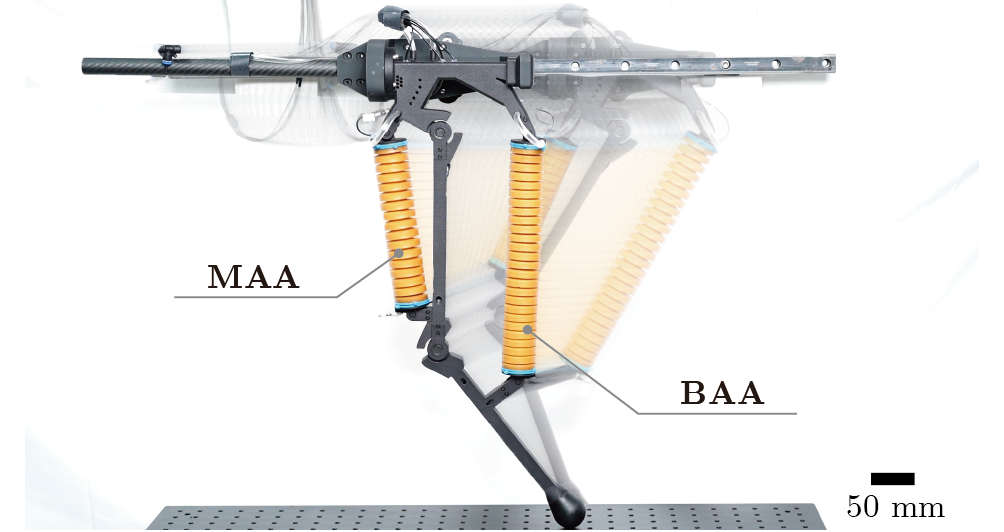
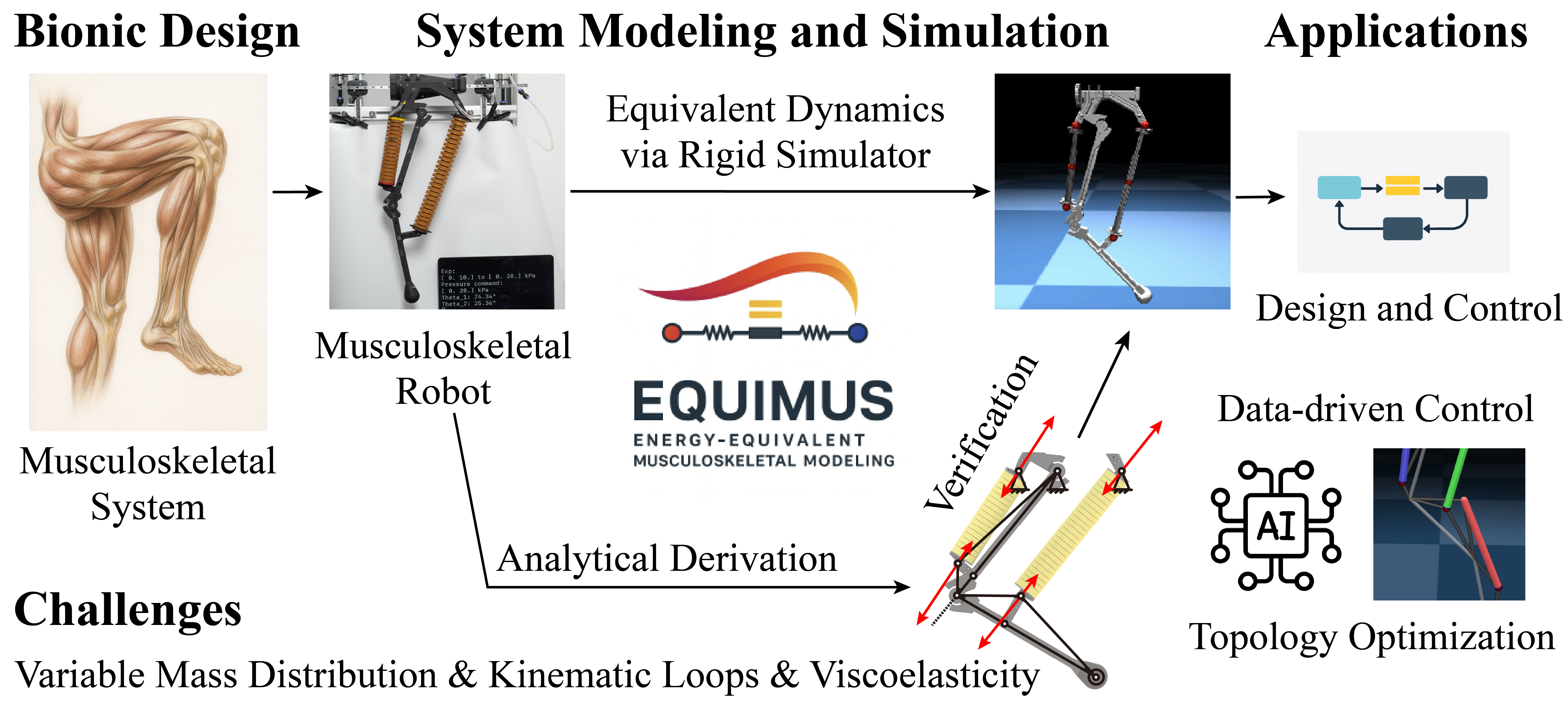
EquiMus: Energy-Equivalent Dynamic Modeling and Simulation of Musculoskeletal Robots Driven by Linear Elastic Actuators
@article{zhu2025eequimus,author={Zhu, Yinglei and Dong, Xuguang and Wang, Qiyao and Shao, Qi and Xie, Fugui and Liu, Xinjun and Zhao, Huichan},journal={IEEE Robotics and Automation Letters},title={EquiMus: Energy-Equivalent Dynamic Modeling and Simulation of Musculoskeletal Robots Driven by Linear Elastic Actuators},year={2025},doi={TBD},}
@inproceedings{zhu2024whleaper,title={Whleaper: A 10-DOF Flexible Bipedal Wheeled Robot},author={Zhu, Yinglei and He, Sixiao and Qi, Zhenghao and Yong, Zhuoyuan and Qin, Yihua and Chen, Jianyu},booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},pages={11272-11277},year={2024},organization={IEEE},doi={10.1109/IROS58592.2024.10801355},}